1 请简要介绍下SVM,机器学习 ML模型 易SVM,全称是support vector machine,中文名叫支持向量机。SVM是一个面向数据的分类算法,它的目标是为确定一个分类超平面,从而将不同的数据分隔开。
扩展:这里有篇文章详尽介绍了SVM的原理、推导,《
支持向量机通俗导论(理解SVM的三层境界)》。此外,这里有个视频也是关于SVM的推导:《纯白板手推SVM》
2 请简要介绍下tensorflow的计算图,深度学习 DL框架 中
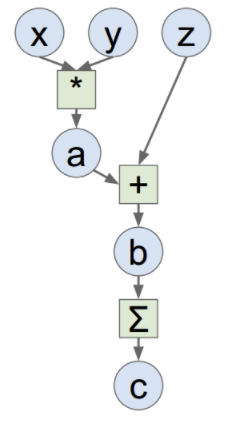
@寒小阳&AntZ:Tensorflow是一个通过计算图的形式来表述计算的编程系统,计算图也叫数据流图,可以把计算图看做是一种有向图,Tensorflow中的每一个节点都是计算图上的一个Tensor, 也就是张量,而节点之间的边描述了计算之间的依赖关系(定义时)和数学操作(运算时)。如下两图表示:
[plain] view plain copy
- a=x*y; b=a+z; c=tf.reduce_sum(b);
3 在k-means或kNN,我们常用欧氏距离来计算最近的邻居之间的距离,有时也用曼哈顿距离,请对比下这两种距离的差别。机器学习 ML模型 中
欧氏距离,最常见的两点之间或多点之间的距离表示法,又称之为欧几里得度量,它定义于欧几里得空间中,如点 x = (x1,...,xn) 和 y = (y1,...,yn) 之间的距离为:

欧氏距离虽然很有用,但也有明显的缺点。它将样品的不同属性(即各指标或各变量量纲)之间的差别等同看待,这一点有时不能满足实际要求。例如,在教育研究中,经常遇到对人的分析和判别,个体的不同属性对于区分个体有着不同的重要性。因此,欧氏距离适用于向量各分量的度量标准统一的情况。
- 曼哈顿距离,我们可以定义曼哈顿距离的正式意义为L1-距离或城市区块距离,也就是在欧几里得空间的固定直角坐标系上两点所形成的线段对轴产生的投影的距离总和。例如在平面上,坐标(x1, y1)的点P1与坐标(x2, y2)的点P2的曼哈顿距离为:

- ,要注意的是,曼哈顿距离依赖座标系统的转度,而非系统在座标轴上的平移或映射。当坐标轴变动时,点间的距离就会不同。
通俗来讲,想象你在曼哈顿要从一个十字路口开车到另外一个十字路口,驾驶距离是两点间的直线距离吗?显然不是,除非你能穿越大楼。而实际驾驶距离就是这个“曼哈顿距离”,这也是曼哈顿距离名称的来源, 同时,曼哈顿距离也称为城市街区距离(City Block distance)。
曼哈顿距离和欧式距离一般用途不同,无相互替代性。另,关于各种距离的比较参看《从K近邻算法、距离度量谈到KD树、SIFT+BBF算法》。
4 CNN的卷积核是单层的还是多层的?深度学习 DL模型 中
@AntZ:卷积运算的定义和理解可以看下这篇文章《CNN笔记:通俗理解卷积神经网络》,链接:http://blog.csdn.net/v_july_v/article/details/51812459,在CNN中,卷积计算属于离散卷积, 本来需要卷积核的权重矩阵旋转180度, 但我们并不需要旋转前的权重矩阵形式, 故直接用旋转后权重矩阵作为卷积核表达, 这样的好处就离散卷积运算变成了矩阵点积运算。
一般而言,深度卷积网络是一层又一层的。层的本质是特征图, 存贮输入数据或其中间表示值。一组卷积核则是联系前后两层的网络参数表达体, 训练的目标就是每个卷积核的权重参数组。
描述网络模型中某层的厚度,通常用名词通道channel数或者特征图feature map数。不过人们更习惯把作为数据输入的前层的厚度称之为通道数(比如RGB三色图层称为输入通道数为3),把作为卷积输出的后层的厚度称之为特征图数。
卷积核(filter)一般是3D多层的,除了面积参数, 比如3x3之外, 还有厚度参数H(2D的视为厚度1). 还有一个属性是卷积核的个数N。
卷积核的厚度H, 一般等于前层厚度M(输入通道数或feature map数). 特殊情况M > H。
卷积核的个数N, 一般等于后层厚度(后层feature maps数,因为相等所以也用N表示)。
卷积核通常从属于后层,为后层提供了各种查看前层特征的视角,这个视角是自动形成的。
卷积核厚度等于1时为2D卷积,也就是平面对应点分别相乘然后把结果加起来,相当于点积运算. 各种2D卷积动图可以看这里https://github.com/vdumoulin/conv_arithmetic

卷积核厚度大于1时为3D卷积(depth-wise),每片平面分别求2D卷积,然后把每片卷积结果加起来,作为3D卷积结果;1x1卷积属于3D卷积的一个特例(point-wise),有厚度无面积, 直接把每层单个点相乘再相加。
归纳之,卷积的意思就是把一个区域,不管是一维线段,二维方阵,还是三维长方块,全部按照卷积核的维度形状,从输入挖出同样维度形状, 对应逐点相乘后求和,浓缩成一个标量值也就是降到零维度,作为输出到一个特征图的一个点的值. 这个很像渔夫收网。
可以比喻一群渔夫坐一个渔船撒网打鱼,鱼塘是多层水域,每层鱼儿不同。
船每次移位一个stride到一个地方,每个渔夫撒一网,得到收获,然后换一个距离stride再撒,如此重复直到遍历鱼塘。
A渔夫盯着鱼的品种,遍历鱼塘后该渔夫描绘了鱼塘的鱼品种分布;
B渔夫盯着鱼的重量,遍历鱼塘后该渔夫描绘了鱼塘的鱼重量分布;
还有N-2个渔夫,各自兴趣各干各的;
最后得到N个特征图,描述了鱼塘的一切!
2D卷积表示渔夫的网就是带一圈浮标的渔网,只打上面一层水体的鱼;
3D卷积表示渔夫的网是多层嵌套的渔网,上中下层水体的鱼儿都跑不掉;
1x1卷积可以视为每次移位stride,甩钩钓鱼代替了撒网;
下面解释一下特殊情况的 M > H:
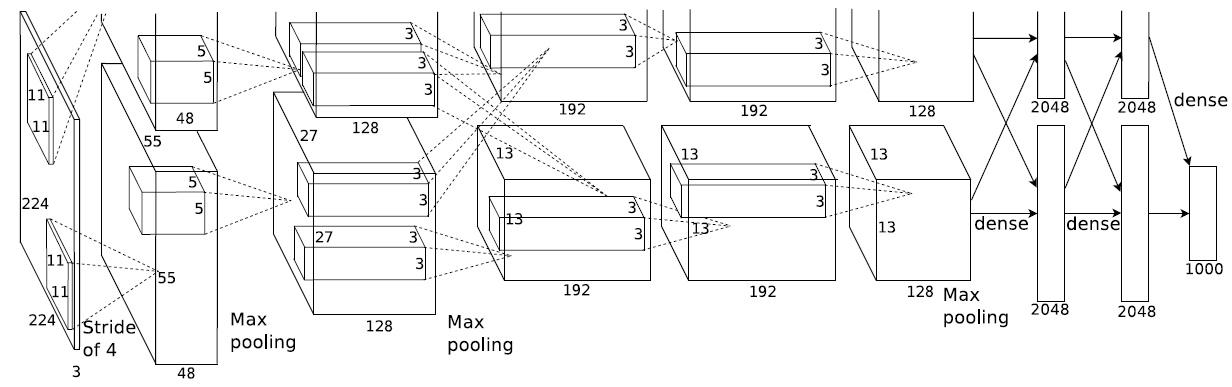
实际上,除了输入数据的通道数比较少之外,中间层的feature map数很多,这样中间层算卷积会累死计算机(鱼塘太深,每层鱼都打,需要的鱼网太重了)。所以很多深度卷积网络把全部通道/特征图划分一下,每个卷积核只看其中一部分(渔夫A的渔网只打捞深水段,渔夫B的渔网只打捞浅水段)。这样整个深度网络架构是横向开始分道扬镳了,到最后才又融合。这样看来,很多网络模型的架构不完全是突发奇想,而是是被参数计算量逼得。特别是现在需要在移动设备上进行AI应用计算(也叫推断), 模型参数规模必须更小, 所以出现很多减少握手规模的卷积形式, 现在主流网络架构大都如此。比如AlexNet: